









研究室紹介動画
所属教員,学生が研究テーマや研究室について紹介します.
研究内容
当研究室の研究テーマには,遠隔操縦システムやバーチャルリアリティなど,人と機械とが相互作用するようなシステムの研究,ロボットハンドによる把持操りや人の手の機能解析などのマニピュレーションに関する研究,車輪型移動ロボットによる環境認識・地図生成や2足歩行ロボットの歩行・転倒回避制御などの移動ロボットに関する研究があります.
遠隔操縦システムに関する研究
マニピュレーションに関する研究
移動ロボットに関する研究
ハプティクス(触覚)に関する研究
その他の研究
以下のページでは,横小路教授によるミニ講義(ロボット,遠隔操縦,VR)をご覧いただけます. 高校生(受験生)に向けた記事ですが,大学生にとっても大いに興味を引くトピックであり,学問の世界の一端を分かりやすく垣間見ることができます.
当研究室の研究に関する横小路教授のインタビュー記事が以下のリンクからご覧いただけます.
遠隔操縦システムの基盤的研究
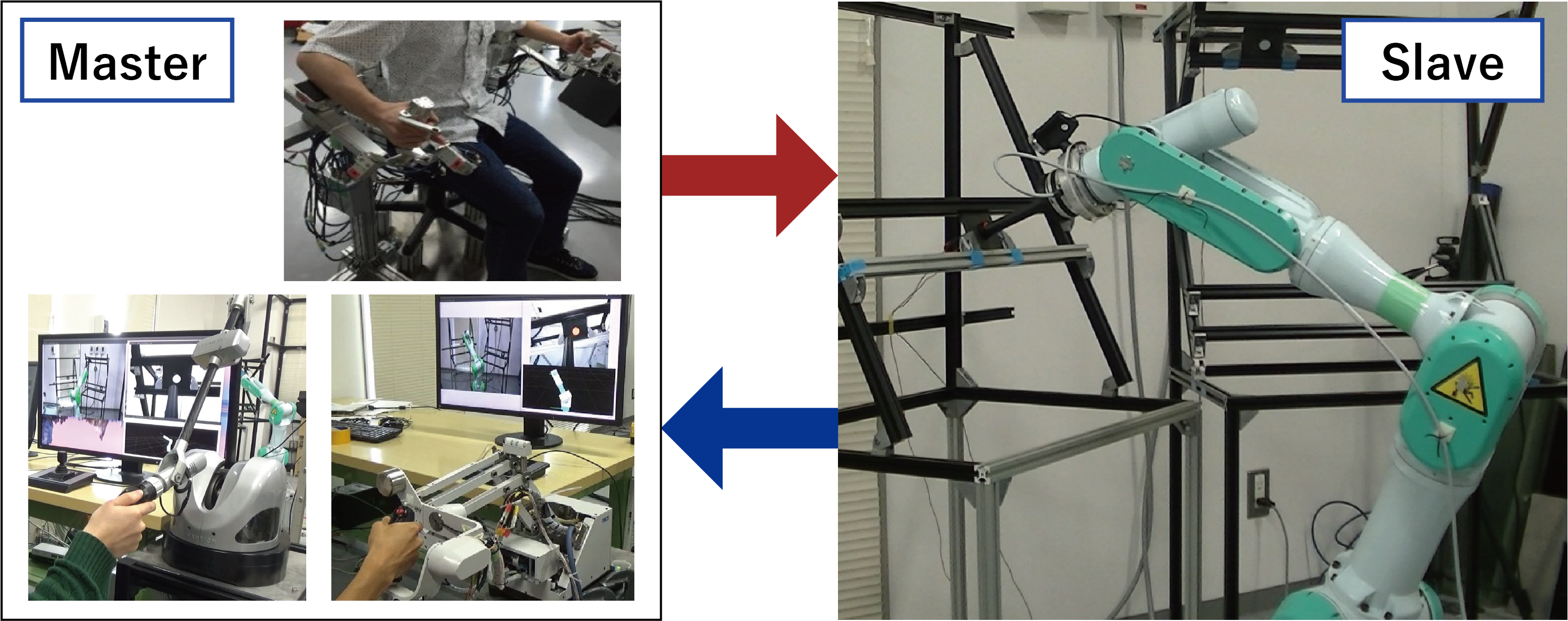
遠隔操縦によって,原子炉や海底,宇宙空間など,直接人間が入り込めない環境での作業のほか,人間の動きを縮小することによって手術などの微細作業が直感的に行えることが期待されています. 本研究室では,離れたところにあるロボット(スレーブ)を, 手元にあるロボット(マスタ)を介して操縦することで,あたかも離れた場所にいるかのような感覚で作業できるマスタ・スレーブ方式を中心に遠隔操縦システムの基盤的な研究をしています. 具体的には,スレーブと異なる構造を持つマスタによる直感的な操縦方法や複数のカメラ画像を見ながら直感的に遠隔操縦する手法についての研究を行っています.
冗長マニュピレータの軌道計画と遠隔操縦
災害現場等における作業では,器用な動きが可能であるため多数の自由度を有する冗長マニピュレータの利用が期待されています. しかし,自由度が多いため遠隔操縦は非常に困難であり,オペレータに加わる負担は大きいです. オペレータは,マニピュレータが障害物に接触せず,かつ特異姿勢にならないように注意して操縦する必要があります.
本研究室では,オペレータに加わる操縦負担を軽減するために,軌道計画をあらかじめ行い,オペレータは計画された軌道を確認し,軌道実行速度を与えるだけで遠隔操縦を行うシステムの開発に取り組んでいます.
油圧駆動ロボットの遠隔操縦
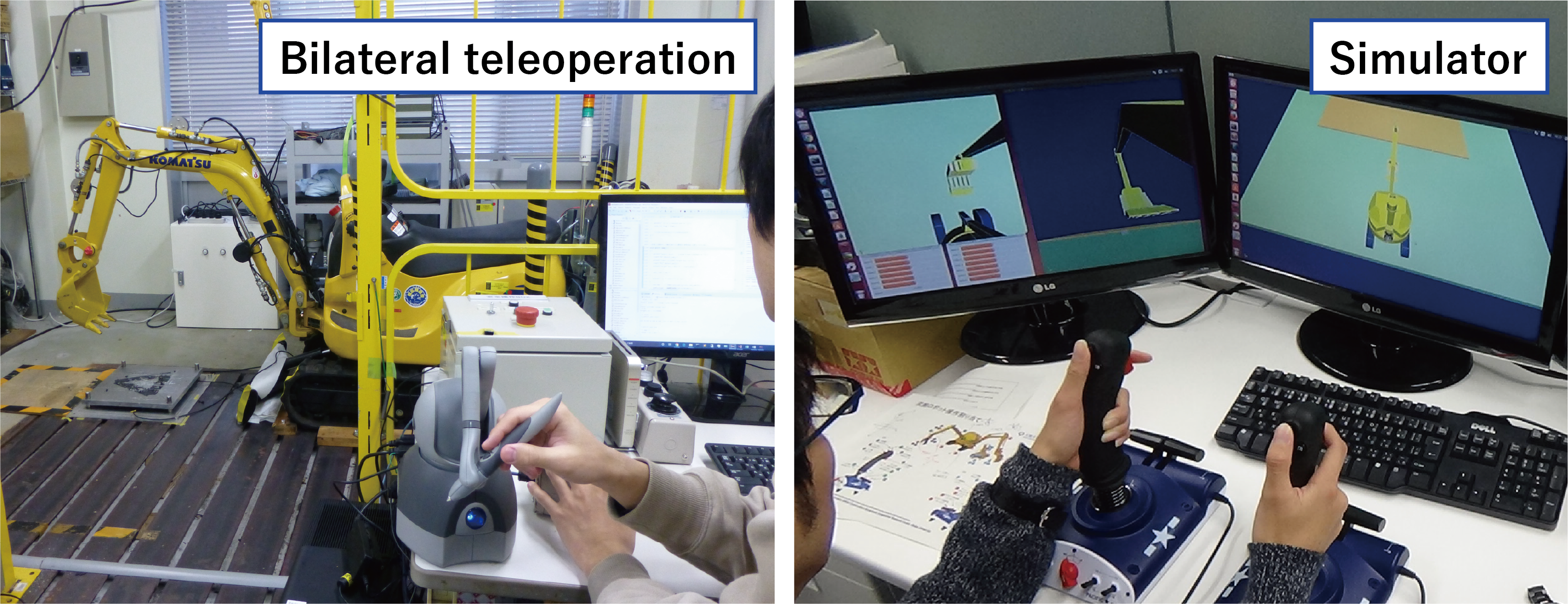
地震等の災害現場でレスキュー活動を行う油圧駆動ロボット人出不足が問題となっている土木作業現場における建設機械の遠隔操縦に関する研究を行っています.
油圧駆動ロボットは大出力が可能である一方で,シリンダや制御弁で生じる摩擦が原因で精密動作は困難です. 本研究室では,制御入力を量子化して摩擦補償を行うことで動作精度を改善する手法を研究しています.
また,遠隔操縦の際には操縦デバイスや画面配置等のインタフェースに応じて操作性が変化します. そこで,シミュレータを用いたインタフェースの検討や,シリンダ圧力等から推定した手先負荷力をオペレータに提示する力覚フィードバックに関する研究を行っています.
折り紙ロボット
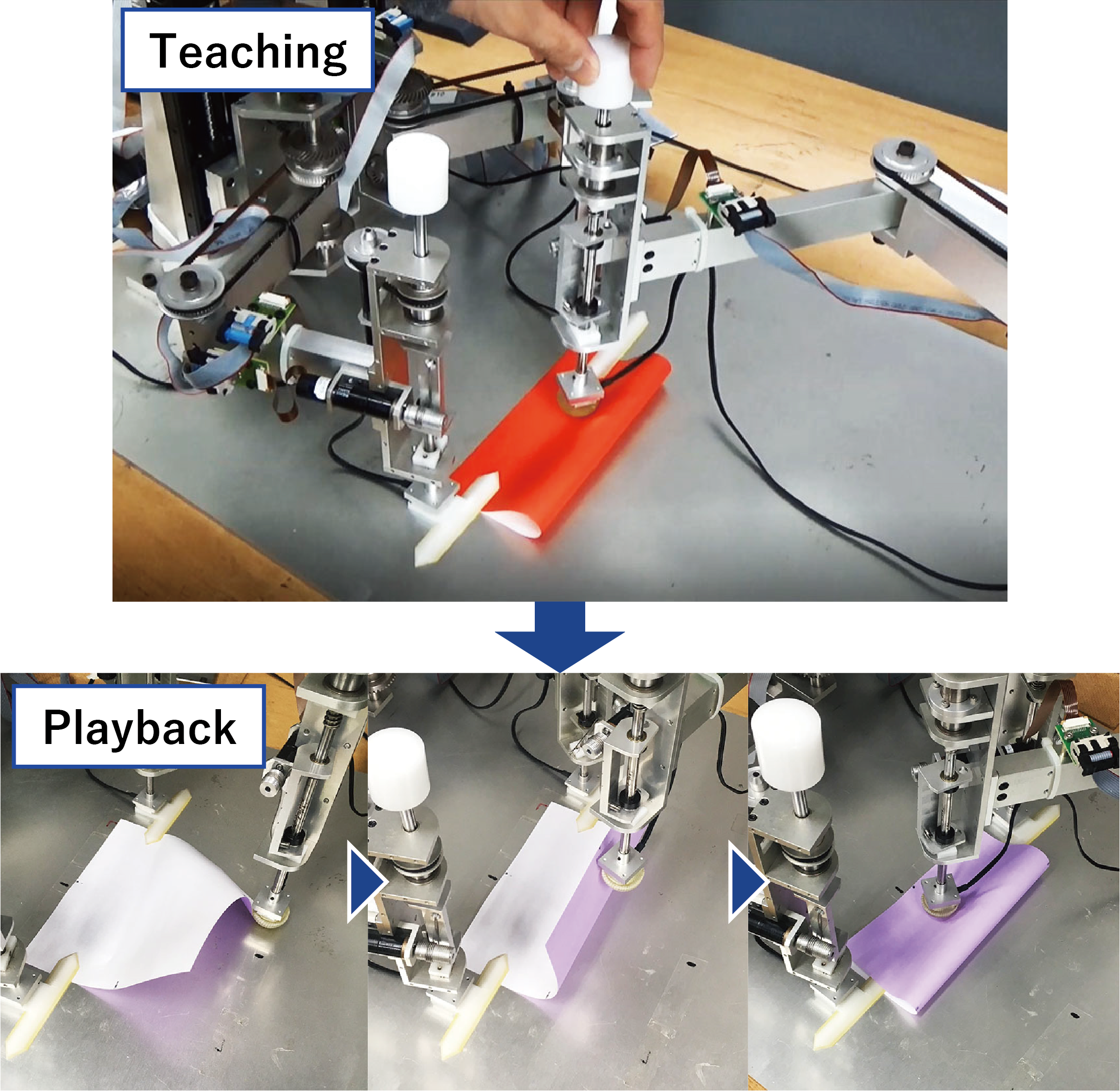
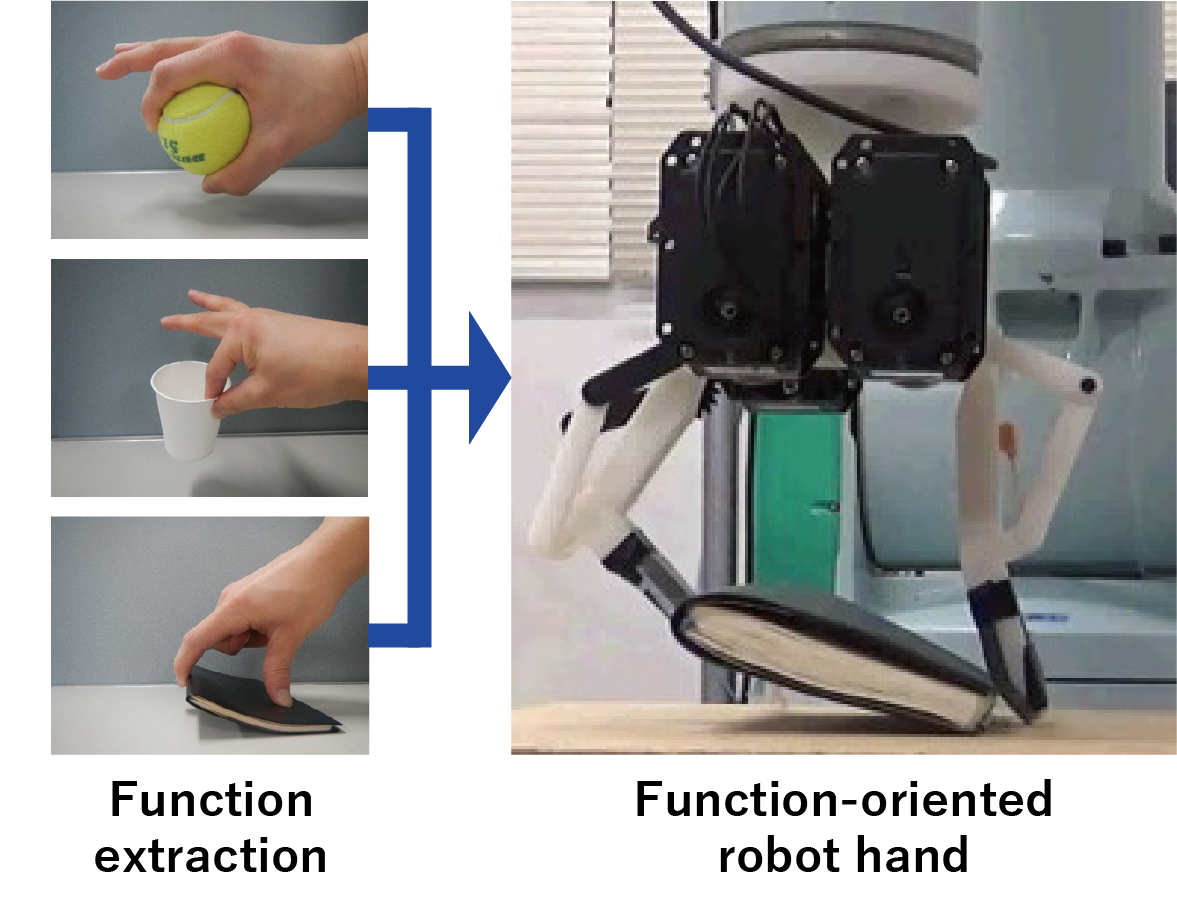
「折り紙」という器用さを必要とする作業をロボットハンドに実現させることにより,人の手の器用さの本質を理解しようとする研究を行っています.
本研究では,直接教示法という,人がロボットを直接手で持って操作し動作を教示する手法を採用することで,人の無意識的な操作情報を取得します. そして,得られた操作情報の中から作業達成に必要な情報(作業スキル)を抽出し,高精度な作業精度を達成するための制御や機構の設計に活用しています.
手の器用さは,現在のロボットの応用を阻むボトルネックとなっており,器用なロボットハンドが実現されれば,工場での製品組み立てや生活支援の場における作業など,ロボットの応用範囲の拡大が期待されます.
ピッキング作業のための汎用ロボットハンド
物流分野におけるピッキング作業のためのマニピュレーションシステムに関する研究を行っています. 例えば,様々な物体の把持や操作を可能にする汎用的なロボットハンドを開発しています. 人は多様な商品を安定に把持したり,把持したまま別の姿勢に遷移させたりすることができます. このような人の手の器用さから本質的な機能を分析・抽出し,得られた機能を搭載することで高い汎用性を実現しています.
人の手の器用さを理解するために,人の手による作業を計測して解 析しますが,必要に応じて人の手の筋骨格モデルに基づいた動作解析も行っています.
組み立て作業のための汎用ハンドと把持戦略
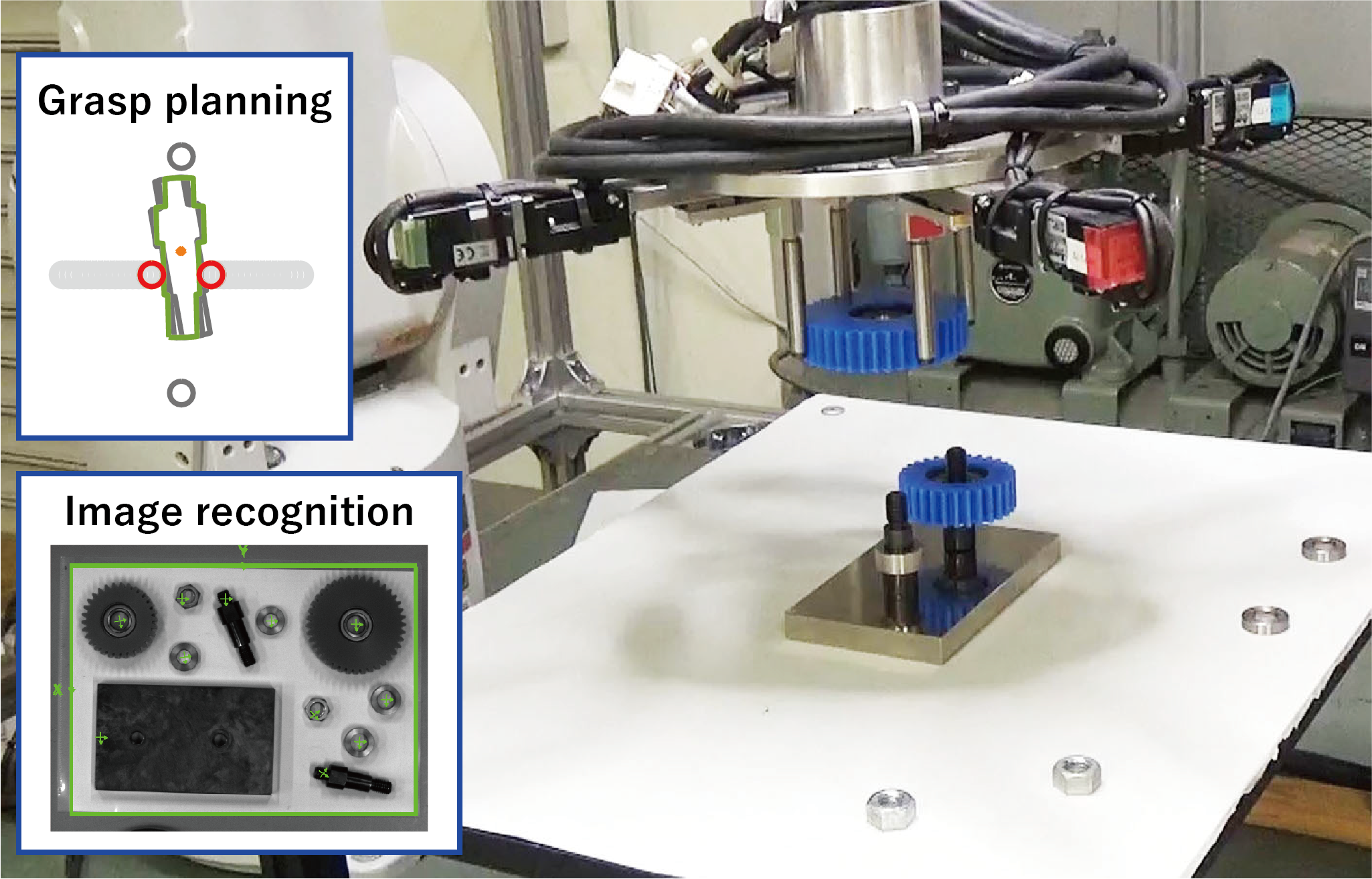
現状の産業用ロボットは,セットアップに相応の手間とコストがかかるうえ,対象製品の変更や生産要求の変化に対して柔軟に対応できないので,変種変量生産や製品寿命が短い製品の組み立ては人手に頼っているのが現状です. このようなものづくりの分野でも鍵となるのは,正確な位置決めのための特殊な治具がなくても,様々な形状の部品を把持でき,精密な嵌めあいを含むような製品の組み立てが可能となる汎用ロボットハンドを含むロボットシステムの実現です.
本研究室では,変種変量生産における新たな生産要求にも迅速に無駄なく対応できる生産システムの実現を目指して,様々な部品を把持することができる汎用的なハンドの機構と把持戦略に関する研究を行っています.
二足歩行ロボット・人型ロボットの動作計画と制御
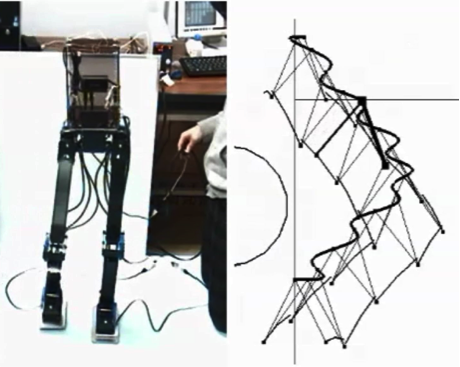
二足ロボットやヒューマノイドロボットは人間の生活環境との親和性の高さから生活支援や作業支援,エンタテインメントなどの様々な分野で活躍が期待されています.実時間軌道生成やモデル予測制御などの技術を駆使し,不整地歩行や外乱に強い転倒回避運動を可能とする制御手法の実現を目指しています.
自律移動ロボットの環境認識と地図生成
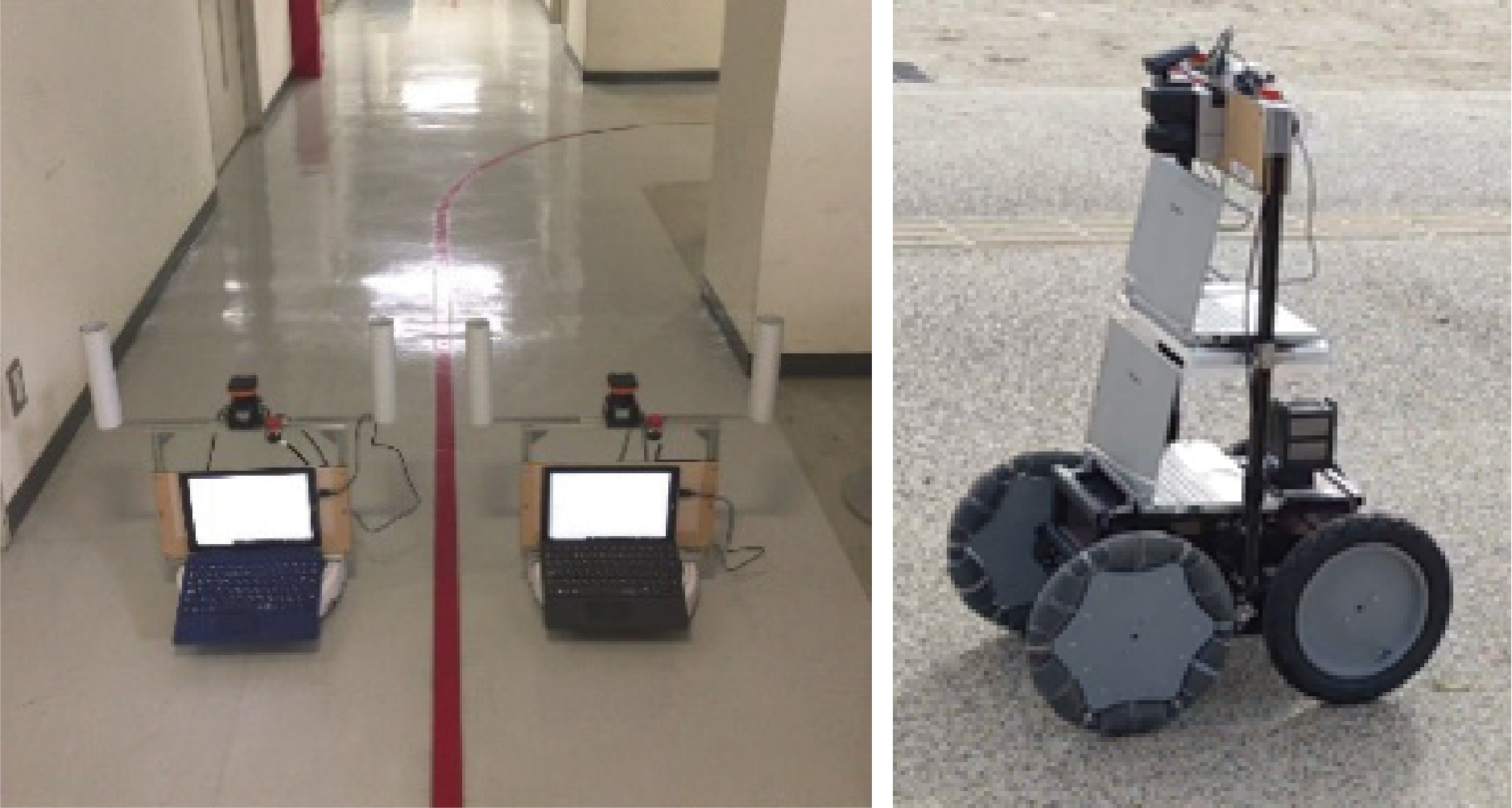
ロボットが整備されていない屋外環境で作業を遂行するには,柔軟な環境認識能力が必要です.レーザー測域センサやカメラから得られる大量のデータから特徴を抽出することで,コンパクトで人間にとって理解しやすい地図を自動生成する手法や,ロボット群が相互測位にもとづいて協調的に地図生成や物資搬送を行う手法の開発に取り組んでいます.
ロボティクスやVRのための触覚・力覚ディスプレイ
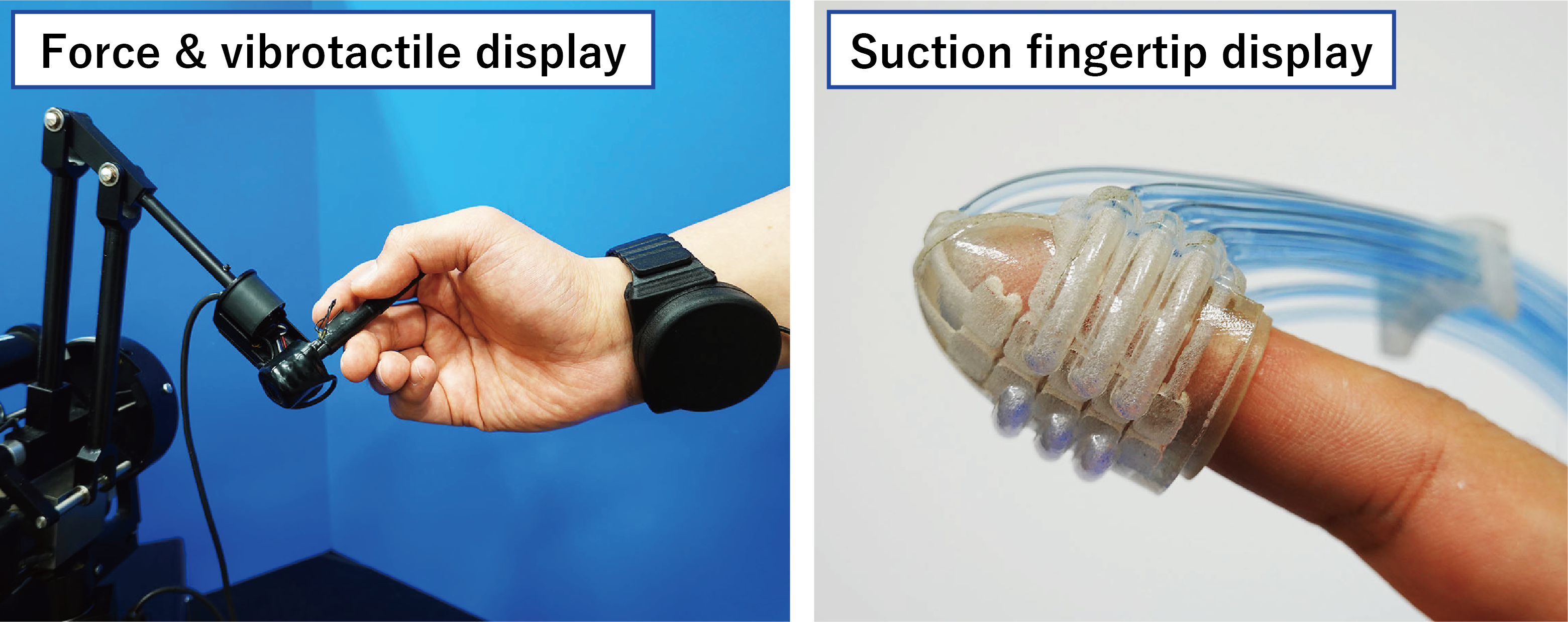
物体に触れる感覚を人工的に再現する触覚・力覚ディスプレイを研究しています. 例えば,VR空間中の物体に触れる感覚を提示するディスプレイや,遠隔地のロボットや人が感じる触覚を計測し別の人に伝送する技術を開発しています.
これまでに,時間的に高解像度な触覚を再現可能な機械振動型の触覚ディスプレイや,空間的に高解像度な触覚を再現可能な空気吸引型の触覚ディスプレイや,人の知覚特性を考慮した触覚情報の変調手法を開発してきました.
人の触感性の計測・分析・モデリング
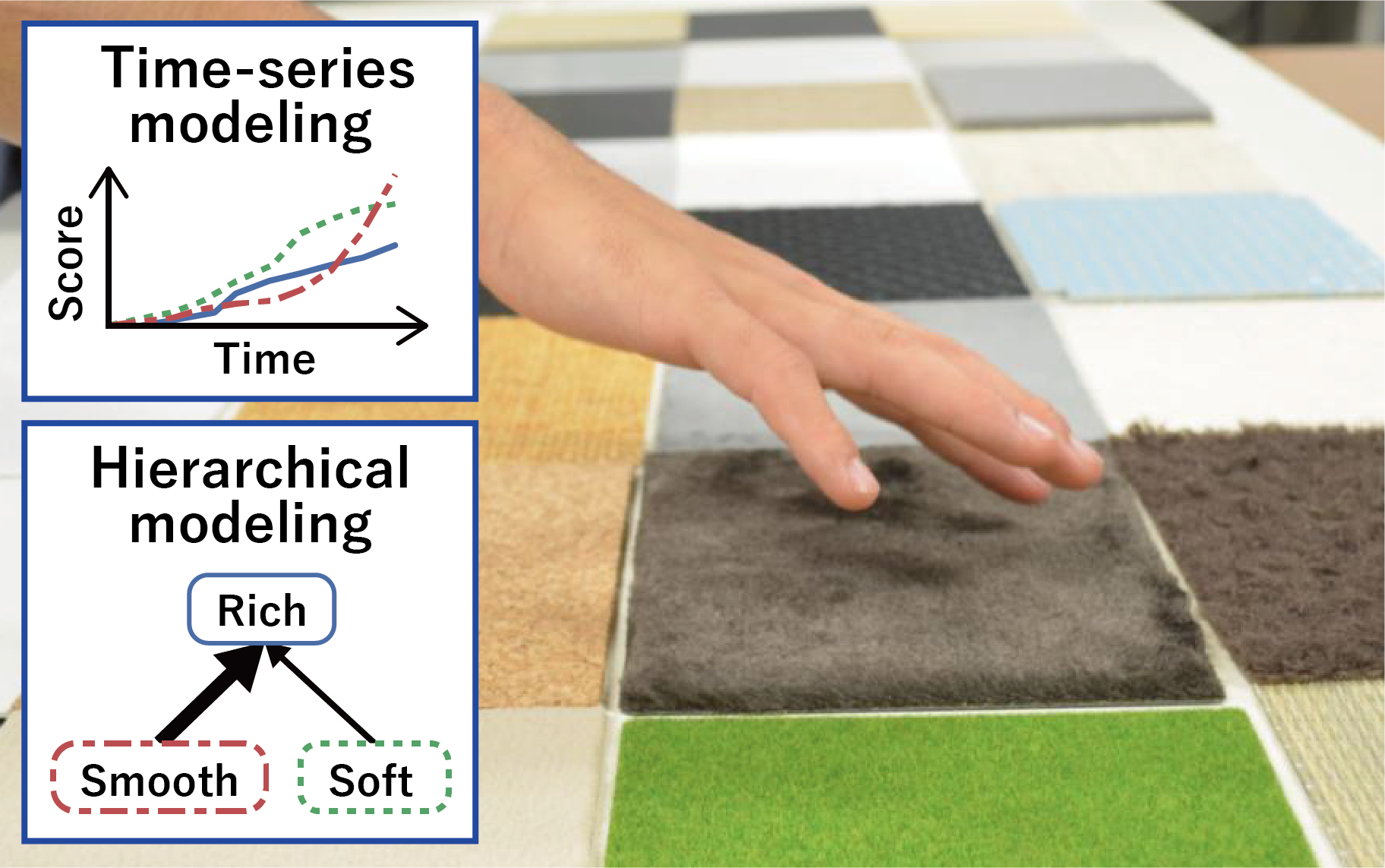
「つるつる」,「ざらざら」などの人の触感性は多くの個人差を含む多様な感覚です. 個人差を活かしたものづくりへの適用を目指し,多様な人の触感を計測・分析・モデリングする手法を開発しています.
これまでに,時々刻々と変化する触感を計測・分析する手法を提案しました. 従来の官能評価手法では見落とされる触感およびその個人差を定量的に計測・分析可能となりました. また,階層的なモデリング手法によって,高級感などの感性的な触感の定量的な理解・設計を実現しました.
早期認知症者のパーソンセンタード・サポート
社会の高齢化に伴う重大な社会問題の一つに,増加し続ける認知症があります. 認知症になられた早期の方々に,工学的視点から支援をいかに提供すべきかを研究しています.
認知症の方々への「パーソンセンタード・サポート」の目的は,認知症のご本人および周囲のご家族等の良い状態(well-being)や良い関係を維持・構築して戴くことです. そこで,ご本人のQOL(Quality of Life)にとって大切なことに基づいて支援ニーズを明確にした上で,支援策を検討して適用し,それがご本人とご家族の良い状態,良い関係の実現に貢献できているかを(工学的に)評価する方法の確立を追求しています.