








RESEARCH
Specific research topics in our laboratory include human-machine interaction systems such as teleoperation systems and virtual reality systems, issues on dexterous manipulation such as grasping and manipulation by a robotic hand and function analysis of human hand, and a series of research on mobile robots and vehicles, such as blimp robot, wheeled mobile robot, unmanned vehicle, agricultural robot, active suspension for automobiles, and autonomous driving and platooning of freight vehicles on highways.
Teleoperation
- Fundamental research of teleoperation system
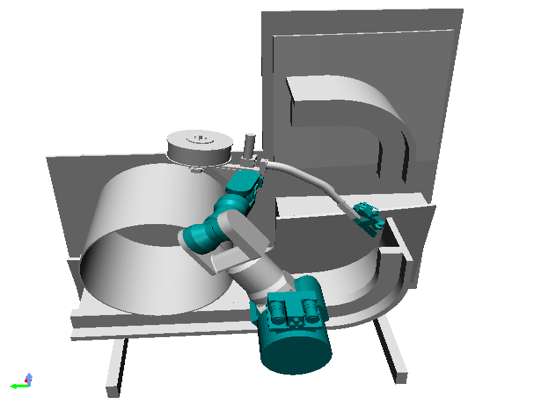
- Trajectory planning and teleoperation of redundant manipulator
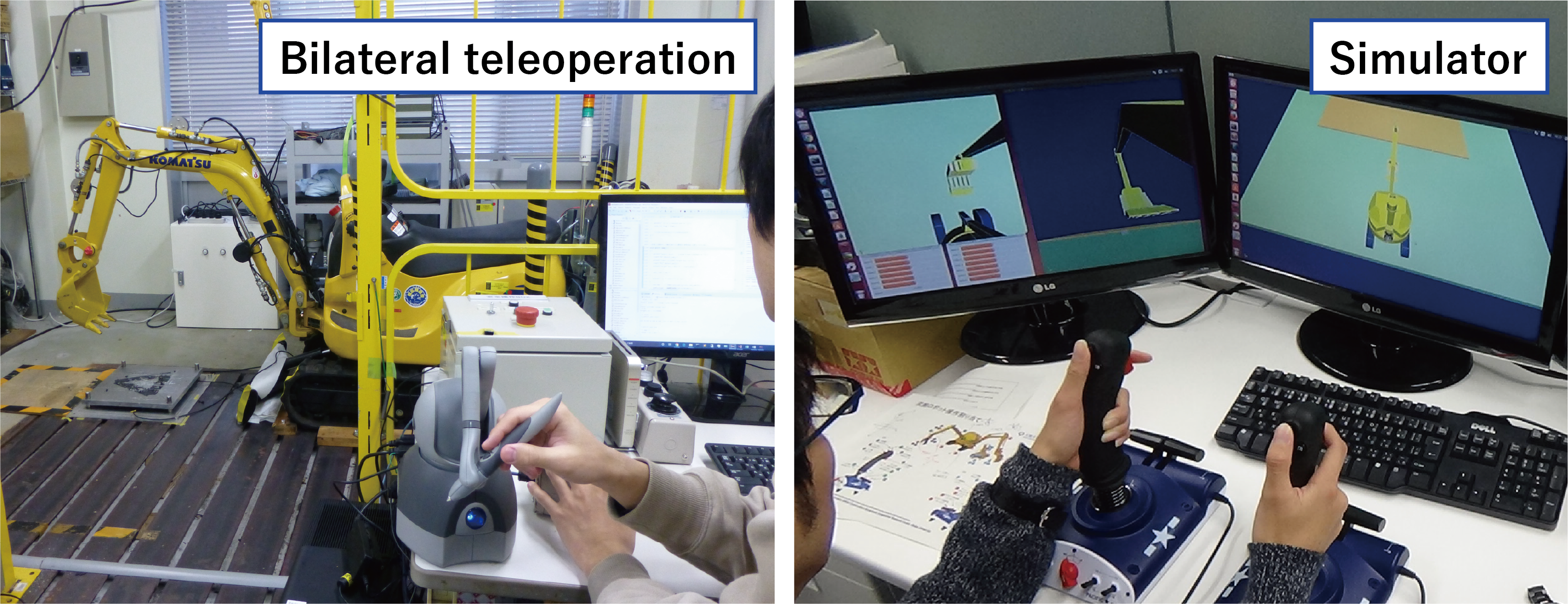
- Teleoperation of hydraulic robot
Manipulation
Mobile robot
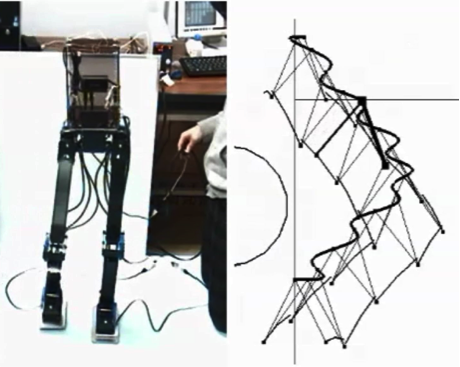
- Motion planning and control of biped robot/humanoid robot
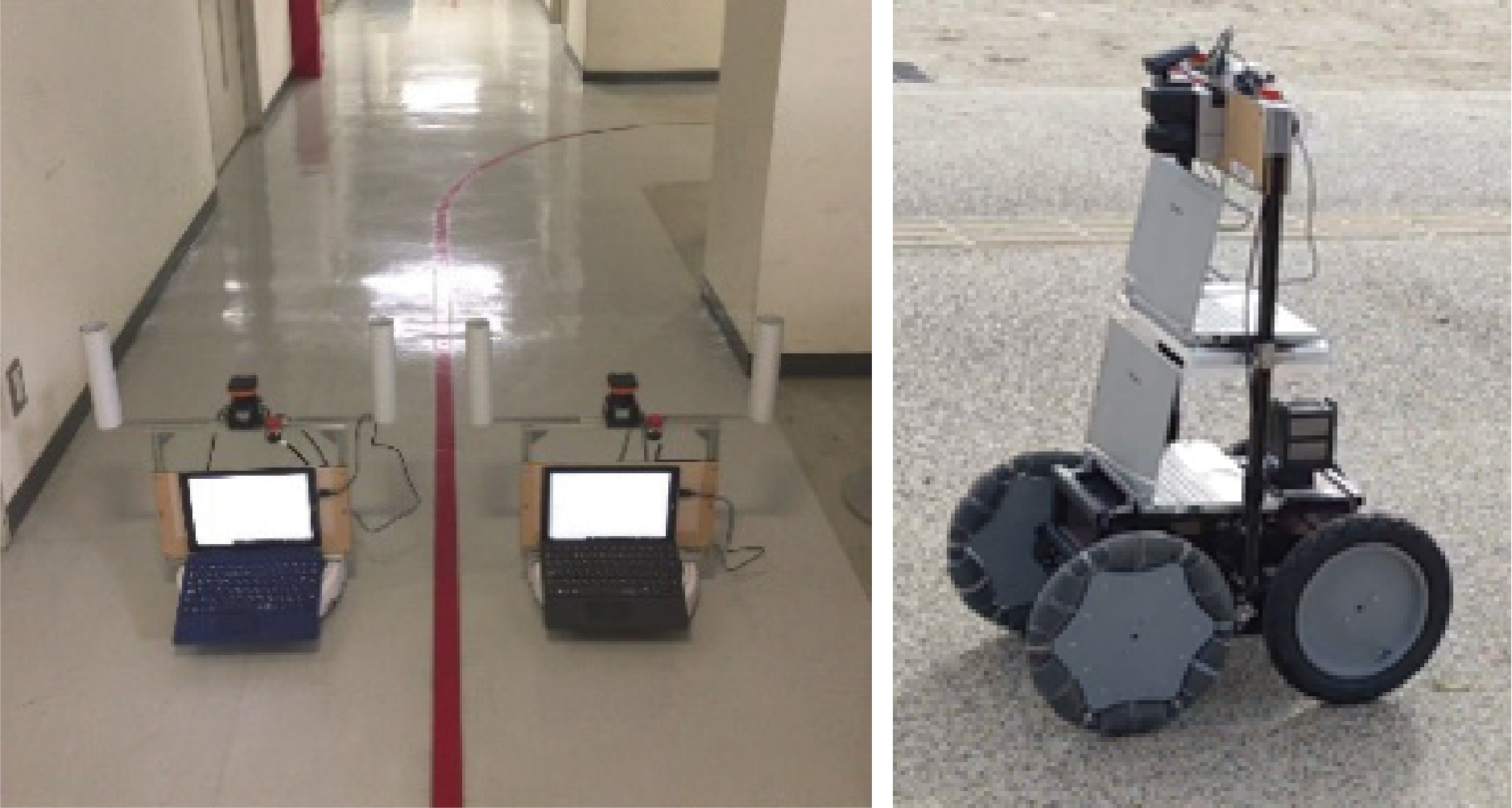
- Environment recognition and map generation for autonomous mobile robot
Haptics
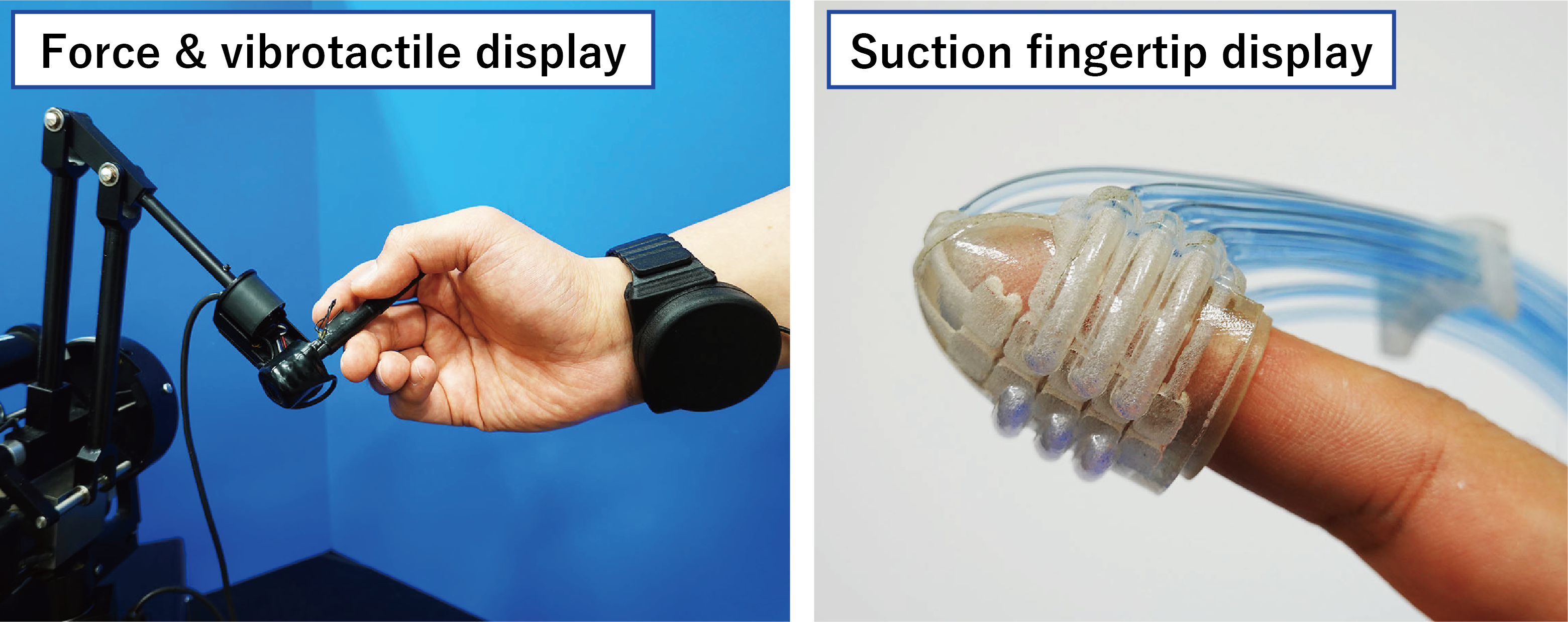
- Haptic display for VR and robotic teleoperation
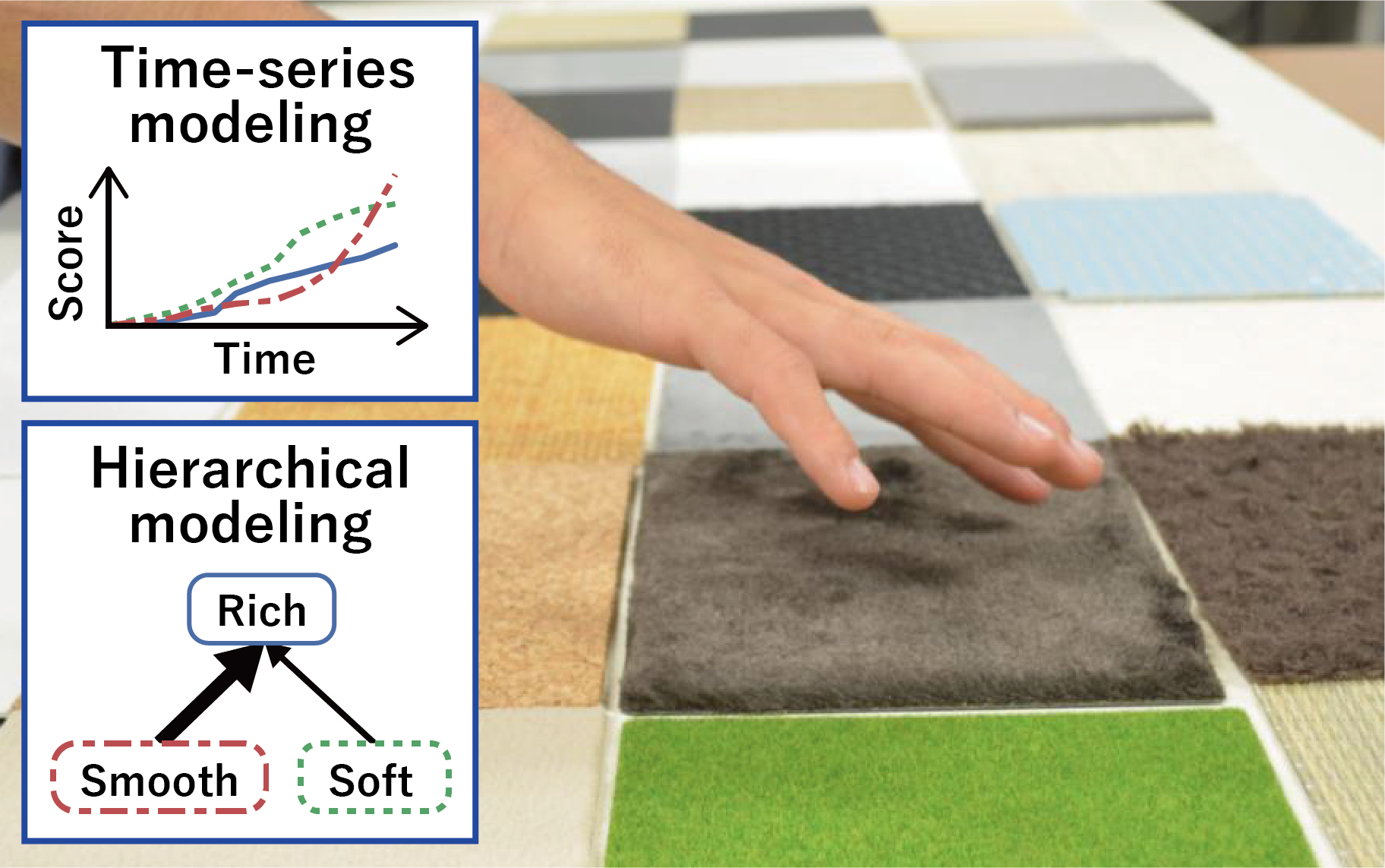
- Measurement, analysis and modeling of human haptic sensation
Other research
Fundamental research of teleoperation system
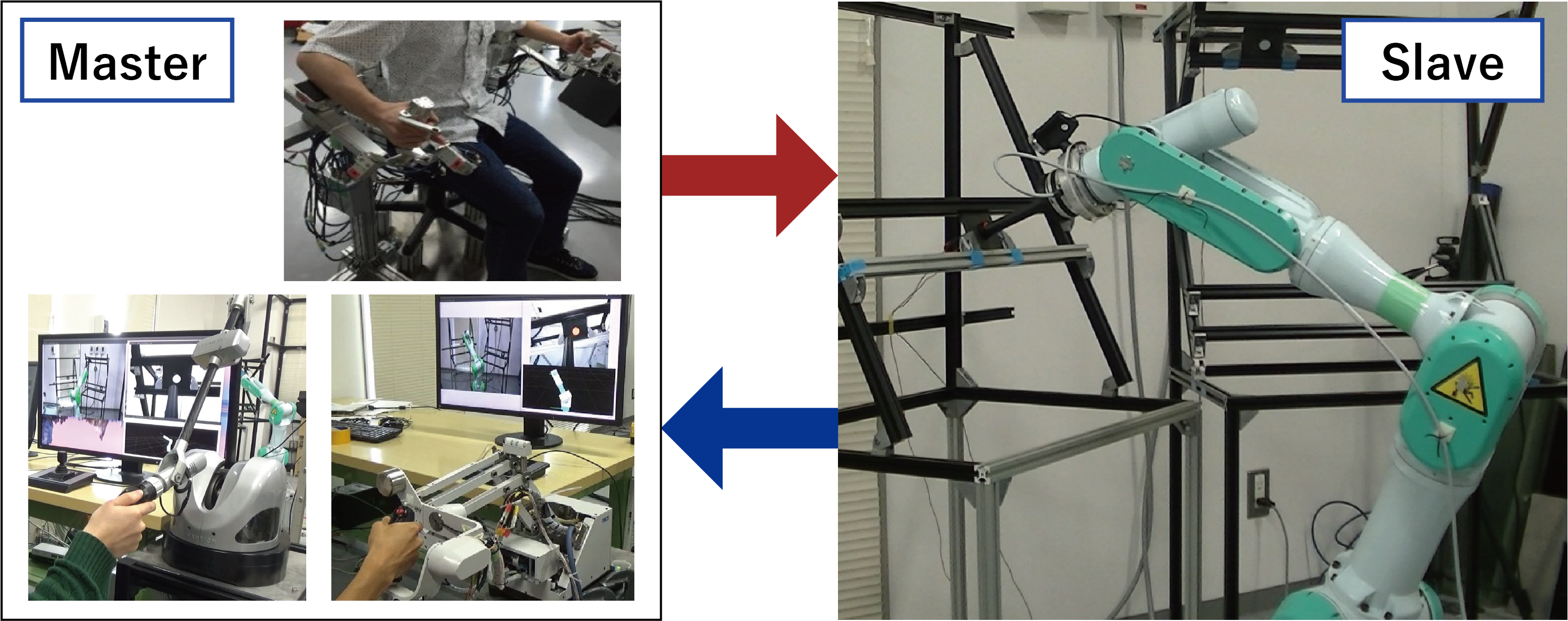
Trajectory planning and teleoperation of redundant manipulator
Teleoperation of hydraulic robot
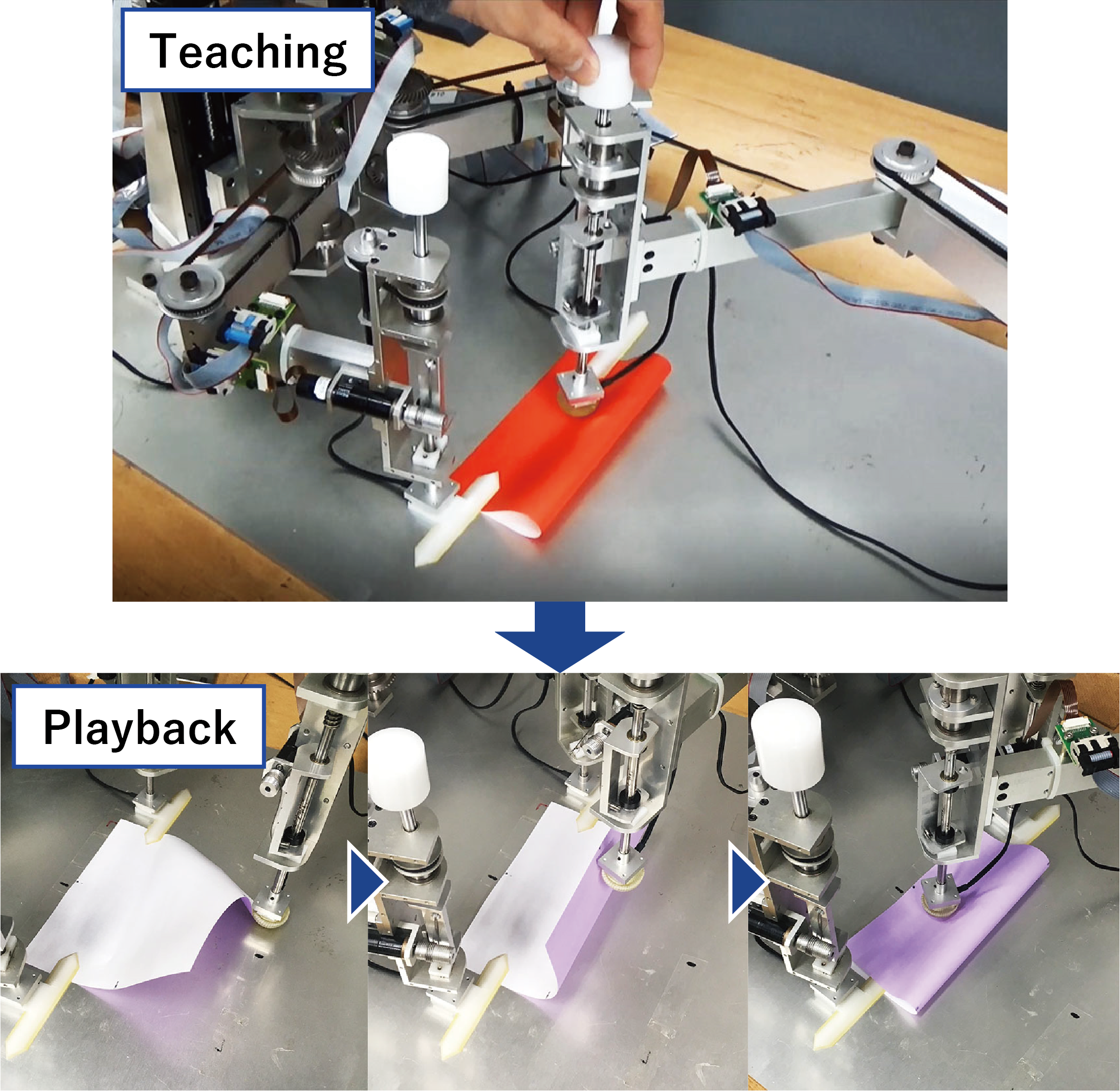
Origami robot
Robot hand for picking work
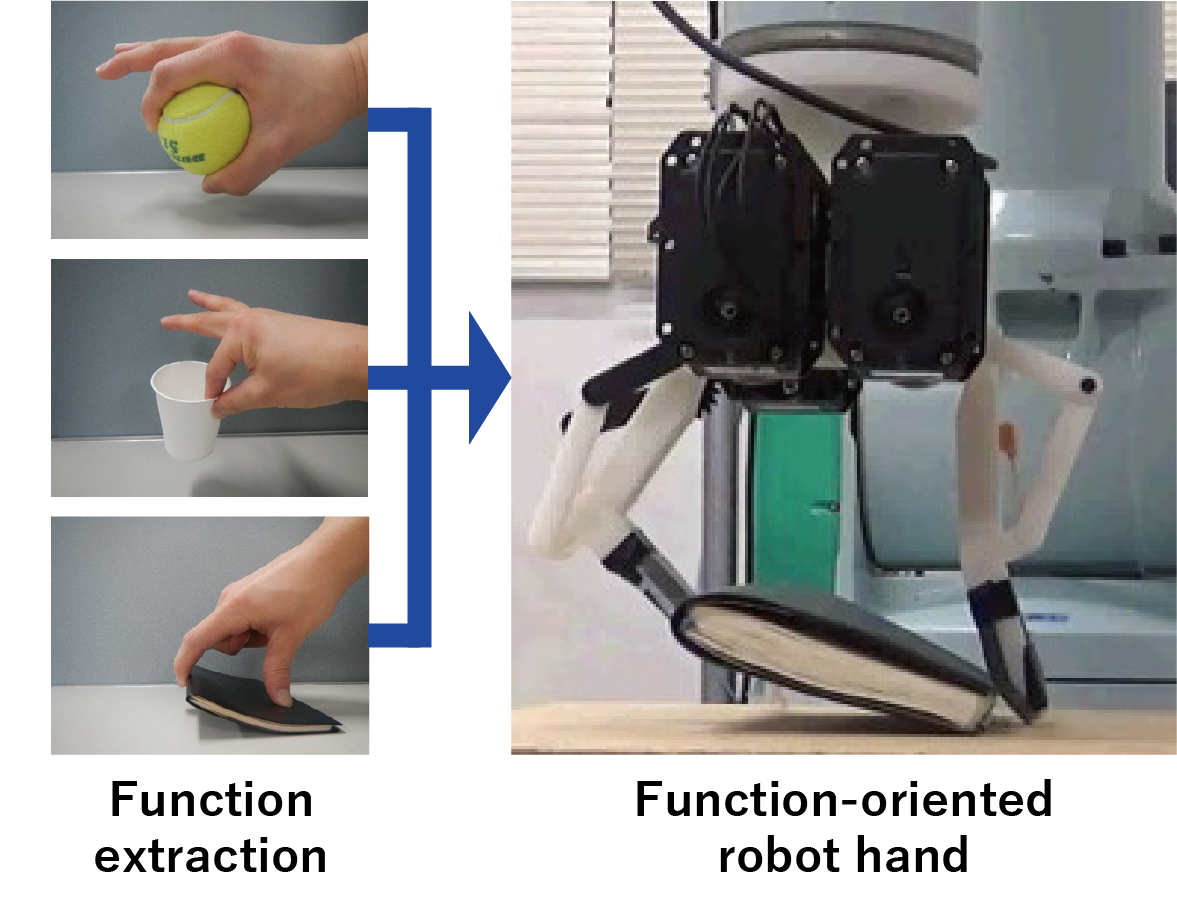
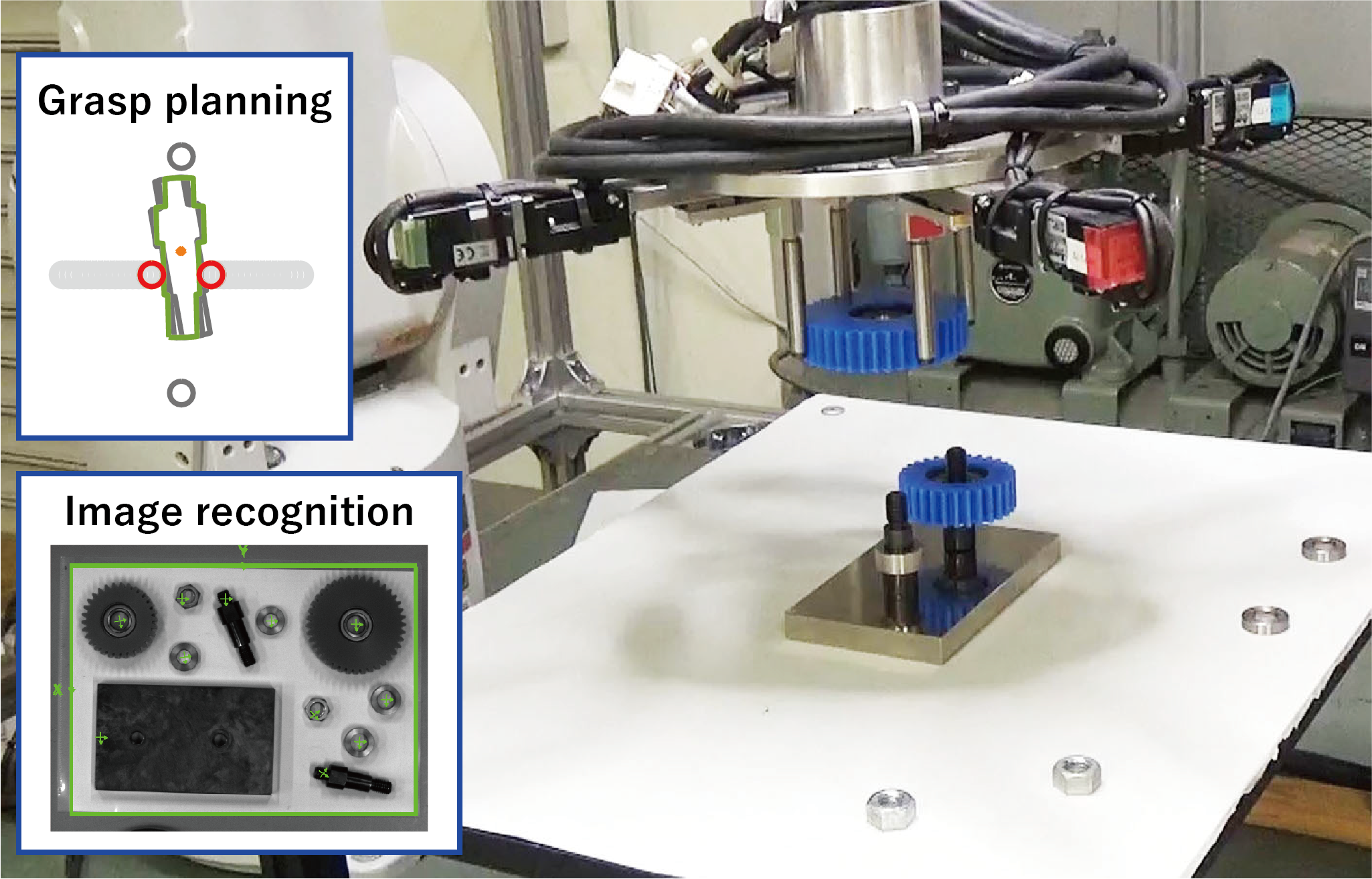
Robot hand and gripping strategy for assembly work
Motion planning and control of biped robot/humanoid robot
Environment recognition and map generation for autonomous mobile robot
Haptic display for VR and robotic teleoperation
Measurement, analysis and modeling of human haptic sensation
Person-centered support for people with early-stage dementia
The demographic trends of progressive aging indicate the consequent increase in the number of people with dementia, which will cause crucial social problems. We are conducting research on how to properly provide supports to people with early-stage dementia from engineering viewpoints. The aim of "Person-centered support" for people with dementia is to maintain and/or achieve well-being of the individuals and a good relationship between them and their caregivers.
Currently we are trying to develop a methodology how to identify the real support needs of people with early-stage dementia based on the factors that have great impact to their QOL(Quality of Life), followed by designing and applying the support means, finally to evaluate the efficacy of the means in terms of the well-being of and a good relationship between the individuals and their caregivers.