Teleoperation
- Teleoperation System as a Research Platform
- Ground-Space Bilateral Teleoperation with a Large Time Delay
- Bilateral Teleoperation over the Internet -Dealing with time-varying delay including communication blackout-
- Teleoperated Dual-arm Manipulator for Rescue Operations
Teleoperation System as a Research Platform
We are developing a unified hand/arm master-slave teleoperation system. Both the master device and the slave robot consist of a 3DOF planer arm named "RATSUWAN" and a two-fingered hand named "KUSSHI". Recently, a vision system, named "TASTUGAN", has been added.
We will use this teleoperation system as a research platform for developing an autonomous robotic assembly system. We hope that through our experiences in teleoperation of complicated tasks, we may be able to find what is the bottleneck of the current robotic systems and what is the essence of human dexterity.
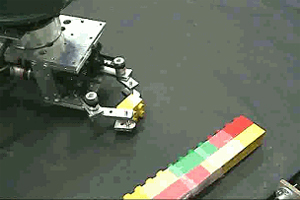
To evaluate the performance of individual teleoperation systems all over the world in equal condition, we propose toy block assembling (LEGO) as the benchmark test for teleoperation systems. Using our hand/arm master-slave system, we announce the measured completion time for assembling some block structures, expecting other research group to try the same task in the future.
- "RATSUWAN" means superior ability in Japanese and its literal expression by Kanji characters is "acerbic arm".
- "KUSSHI", which means one-of-the-best in Japanese and its literal expression by Kanji is "counting on one's fingers".
- "TASUGAN" means dab's eyes.

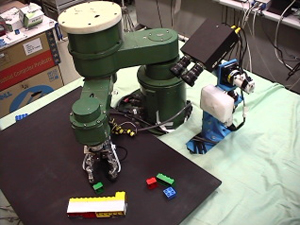
Unified Hand/Arm Master-Slave Teleoperation System "RATSUWAN" and "KUSSHI"
 |
 |
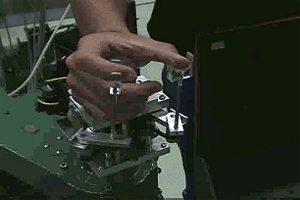
Close-up views of the master hand controller and the slave hand "KUSSHI"
Slave Robot of RATSUWAN and Vision System "TATSUGAN"
Related papers
- Y.Yokokohji, Y.Iida, and T.Yoshikawa, ""Toy Problem" as the Benchmark Test for Teleoperation Systems," Proc. International Conference on Intelligent Robots and Systems (IROS 2000),, pp.996 - 1001, 2000.
- Y.Yokokohji, Y.Iida and T.Yoshikawa: "`Toy Problem' as the Benchmark Test for Teleoperation Systems," Advanced Robotics, Vol.17, No.3, pp.253 - 273, 2003.
Ground-Space Bilateral Teleoperation with a Large Time Delay
A bilateral teleoperation experiment with ETS-VII (Engineering Test Satellite No.7) was conducted on November 22, 1999. To the best of our knowledge, this experiment is the first ground-space teleoperation by direct bilateral control.
Round-trip time for communication between the NASDA (National Space Development Agency of Japan) ground station and the ETS-VII was approximately seven seconds. We constructed a bilateral teleoperator that is stable even under such a long time delay. Several experiments, such as slope tracing task and peg-in-hole task, were carried out. Task performance was compared between the bilateral mode and the unilateral mode with force telemetry data visually displayed on a screen. All tasks were possible by bilateral control without any visual information. Experimental results showed that kinesthetic force feedback to the operator is helpful even under such a long time delay and improves the performance of the task.

ETS-VII
 |
 |
Our control station at the Tsukuba Space Center and a force feed-back joystick
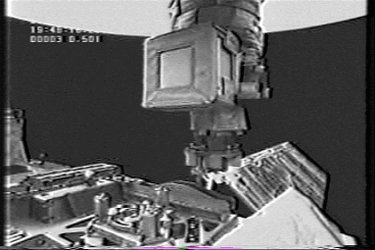
The space manipulator on the satellite, performing the slope tracing task
(A fraction of white big circle at the top of this picture is earth)
Slope-tracing task taken from the camera at the end of the manipulator
Related papers
- T.Imaida, Y.Yokokohji, T.Doi, M.Oda, and T.Yoshikawa, "Ground-Space Bilateral Teleoperation Experiment Using ETS-VII Robot Arm with Direct Kinesthetic Coupling," Proc. IEEE International Conference on Robotics and Automation, pp.1031 - 1038, 2001.
- T.Imaida, Y.Yokokohji, T.Doi, M.Oda, and T.Yoshikawa, "Ground-Space Teleoperation of ETS-VII Robot Arm by Direct Bilateral Coupling under 7-sec Time Delay Condition," Proc. International Symposium on Artificial Intelligence, Robotics and Automation in Space (i-SAIRAS 2001), CD-ROM, 2001.
- T.Imaida, Y.Yokokohji, T.Doi, M.Oda and T.Yoshikawa: "Ground-Space eleoperation of a Robot Arm Mounted on Engineering Test Satellite No.VII by Direct Bilateral Coupling under a Long Time Delay Condition", Journal of Robotics Society of Japan, Vol.21, No.3, pp.309 - 320, 2003. (in Japanese)
- T.Imaida, Y.Yokokohji, T.Doi, M.Oda, T.Yoshikawa: "Ground-Space Bilateral Teleoperation of ETS-VII Robot Arm by Direct Bilateral Coupling under 7-sec Time Delay Condition," IEEE Transaction on Robotics and Automation, Vol.20, No.3, pp.499-511, 2004.
Bilateral Teleoperation over the Internet -Dealing with time-varying delay including communication blackout-
Several approaches based on wave variables have already been proposed for bilateral teleoperation control under time-varying delay. However, these approaches are too conservative for keeping the system passivity or for estimating the amount of virtually constant time delay. These conservative approaches result in too much degradation of maneuverability from the constant time delay situations.
We propose a new control scheme that is also based on wave variables, but minimizes the performance degradation due to the fluctuation of the communication time delay. The proposed method is simple and easy to implement. We also introduced an energy input/output balance monitoring mechanism, which limits the energy that the system can generate and ensures the system passivity even under time-varying delay conditions including communication blackouts.
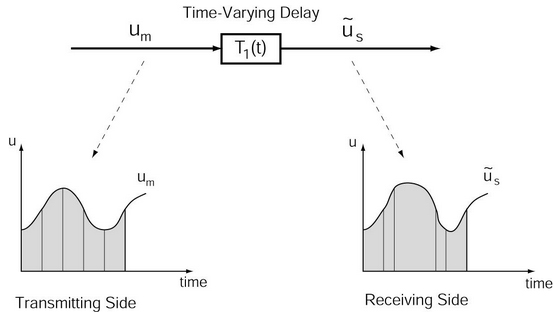
Distortion of wave variables via communication link with time-varying delay
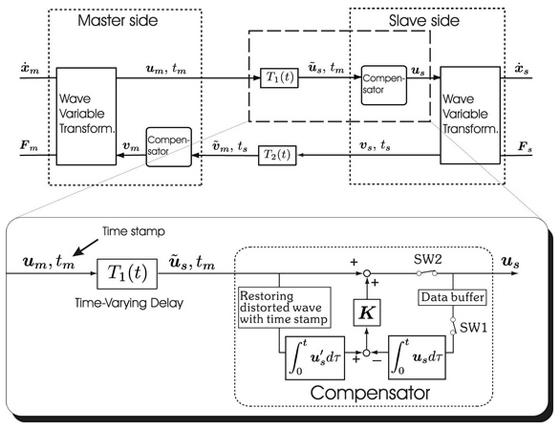
Proposed control architecture
Related papers
- Y.Yokokohji, T.Imaida, and T.Yoshikawa, "Bilateral Teleoperation under Time-Varying Communication Delay," Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS'99), pp.1854 - 1859, 1999.
- Y.Yokokohji, T.Imaida, and T.Yoshikawa, "Bilateral Control with Energy Balance Monitoring Under Time-Varying Communication Delay," Proc. IEEE International Conference on Robotics and Automation, pp.2684 - 2689, 2000.
- Y.Yokokohji, T.Tsujioka, and T.Yoshikawa: "Bilateral Control with Time-Varying Delay including Communication Blackout," Proc. the 10th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp.285- 292, 2002.
Teleoprated Dual-arm Manipulator for Rescue Operations
We are collaborating with Tmsuk, a robot venture company in Kyushu, to develop a teleopearted dual-arm manipulator for rescue operations.
Go to the home-page of T52 by Tmsuk.![]() (Sorry, they have only Japanese pages.)
(Sorry, they have only Japanese pages.)

T-52 Enryu by Tmsuk